Drive-by-Wire vs Drive-by-Cable (Differences and Pros/Cons)
If you’re a car enthusiast, you’ve probably heard of “drive-by-wire” technology. Drive-by-wire is a method of controlling a car’s throttle and brakes electronically, without the use of traditional mechanical linkages.
This technology is becoming increasingly common in new cars, and while not perfect, it offers several advantages over its predecessor (drive-by-cable). Let’s look at the key differences between drive-by-wire vs drive-by-cable.

What is Drive-By-Wire?
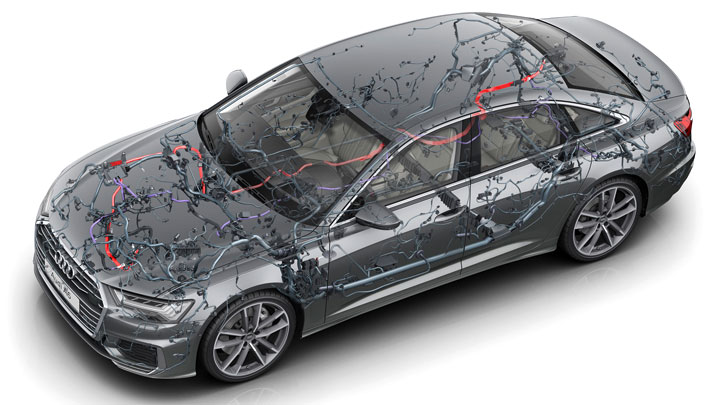
Drive-by-wire refers to the use of electronic control systems in vehicles instead of traditional mechanical linkages. With drive-by-wire technology, a vehicle’s steering, braking, throttle and other major systems are operated by electronic signals rather than direct physical connections.
This system incorporates advanced software, sensors and actuators to replace mechanical cables. For example, an electronic throttle control has position sensors on the pedal which input to a computer module, which then signals an actuator on the throttle body to open or close.
Brake-by-wire and steer-by-wire configurations work on similar principles. Redundant systems are typically used to ensure safety.
Drive-by-wire enables precise computerized control of engine, chassis and body systems. It is increasingly being applied in throttle actuation, brake force modulation, parking assist systems, lane keep assist technologies, and even autonomous self-driving capabilities. As capabilities advance, drive-by-wire promises to transform the performance and functionality of motor vehicles.
Pros
- Enables advanced intelligent features
- Flexible configurability
- Over-the-air update capability
- Supports autonomous operation
- Reduces mechanical complexity
Cons
- High initial implementation cost
- Complex diagnostics and repairs
- Risks from unproven reliability
- Potential cybersecurity vulnerabilities
What is Drive-by-Cable?
In contrast to electronic drive-by-wire, drive-by-cable refers to the conventional use of physical mechanical linkages to connect driver controls to vehicle systems. From early 20th century automobiles through the early 2000s, most production vehicles employed drive-by-cable configurations.
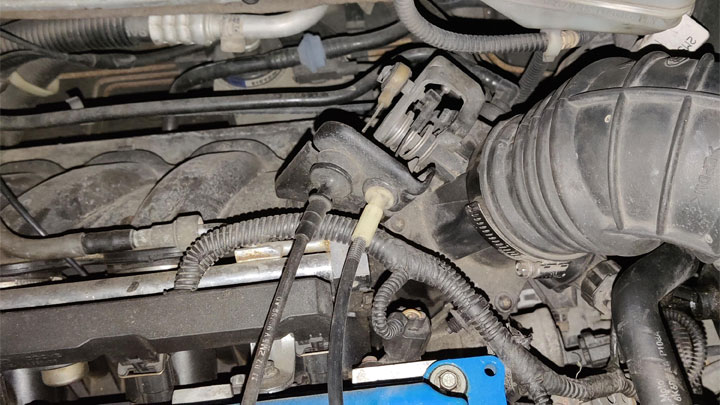
Rather than wires and sensors, drive-by-cable systems utilize components like steel cables, hydraulic lines, rods, bearings, and mechanical springs and linkages.
For example, the accelerator pedal is connected via a Bowden cable that pulls open the carburetor or fuel injection throttle valve. The braking system pushes fluid through lines to actuate hydraulic pistons in drum brake assemblies.
Drive-by-cable delivers proven precision and responsiveness for basic vehicle functions. It continues to be used for some secondary controls like parking brakes and manual transmissions. However, for primary vehicle systems, the limitations of mechanical connectivity have driven rapid adoption of drive-by-wire in contemporary automobile manufacturing.
Pros
- Proven reliable mechanical operation
- Lower per-unit costs
- Simpler maintenance procedures
- Isolated systems limit risk
Cons
- Limited performance and features
- Constrained flexibility for upgrades
- Lags in control response
- Extra mass from steel cables
Differences in Cost
The initial research, development and production costs for drive-by-wire systems are quite high when compared to drive-by-cable. Significant investments in hardware, software and manufacturing processes are required.
Redundant architectures compound these equipment expenses. Complex failure analysis and validation testing also add substantial expense prior to release.
Maintenance and Repair Cost
While expensive to implement, drive-by-wire can reduce long-term service costs once deployed. With fewer moving parts and mechanical wear issues, electronic systems may require less routine maintenance.
However, when faults do occur, sophisticated diagnostic equipment and technical expertise are imperative. Replacement parts also trend higher for sensors and computers versus cables or hydraulics.
Overall life cycle costs can remain a hurdle for widespread adoption of drive-by-wire technology. As research and development expenses are amortized over more vehicle deployments, the premium expense drops. But market willingness to absorb higher sticker prices while long-term savings accrue remains uncertain.
Design Flexibility
Drive-by-Wire
The configurable software controls of drive-by-wire systems permit much more design flexibility compared to mechanical solutions. Vehicle systems can be precisely calibrated and optimized digitally through software adjustments alone. This versatility enables innovations in efficiency, safety, comfort and performance without hardware alterations.
Over-the-air software updates can deploy entirely new capabilities. And by communicating over vehicle data networks, drive-by-wire systems can be readily integrated to coordinate control.
Making changes to drive-by-cable configurations, on the other hand, requires physical retrofits or redesigned components.
Drive-by-Cable
The analog mechanical nature of cables, hydraulics and mechanical linkages impose set limits on tuning and performance. Available adjustments involve physical relationships like cable or rod lengths, lever ratios and brake line bore diameter.
Adapting core control systems like steering gearboxes or brake mechanisms requires substantial reengineering and replacement components.
Drive-by-cable configurations ultimately constrain more radical advancement in vehicle functionality and capabilities. The lack of reconfigurable digital controls hampers introduction of advanced intelligent vehicle features increasingly expected by consumers.
Features and Performance

Drive-by-Wire
Drive-by-wire’s flexible and reprogrammable digital systems readily support sophisticated new vehicle capabilities through software alone. These include:
- Stability Control – Automated braking/throttle/steering corrections to mitigate loss of traction
- Adaptive Cruise Control – Automatic speed adjustments to maintain safe distance from leading vehicle
- Automated Parking Assist – Allowing vehicle to steer itself into parking spots
- Lane Assist – Steering support to stay within or move between roadway lanes
- Autonomous Self-Driving Features – GPS-based navigation and situational analysis replacing driver control
Such intelligent features leverage inputs from cameras, radar and other sensors fused by powerful vehicle computers. They exemplify the greater performance potential unlocked by drive-by-wire.
Drive-by-Cable
While mechanically sound, drive-by-cable imposes inherent constraints around precision, responsiveness and integration.
For example, throttle lag from cable twist or stretch reduces control. Brake line expansion affects pedal feel and modulation. Each system functions adequately in isolation but experiences some compromise.
Absent electronic coordination, tuning trade-offs limit the performance ceiling. And mechanical systems alone simply cannot deliver expanding autonomous functionality. Drive-by-cable handles core control duties but prevents the vehicle from rising above driver dependency.
Safety, Reliability, and Security

Drive-by-Wire
Despite expanding capabilities, drive-by-wire’s complex electronics do pose new considerations around safety, reliability and security versus proven mechanical solutions. Software failures or sensor faults – however unlikely – could disable critical vehicle controls if redundancies are compromised.
And with externally networked systems involved, susceptibility to hacking or malicious attacks arises even with cybersecurity countermeasures in place. Foolproof fail-safes remain imperative as drive-by-wire matures.
Drive-by-Cable
Legacy drive-by-cable configurations feature inherent mechanical redundancy and consistency. Cables may stretch and hydraulics can leak, but total failures are rare without visible damage.
Light degradation over decades of use can be readily identified and serviced. And with no digital networking or software dependence, security risks are negated.
Of course, modern performance expectations and intelligent features are also absent. But if electronic complexities remain unproven long-term, legacy approaches avoid the risks.
OEMs make enormous investments to ensure drive-by-wire dependability and security however. Meeting rigorous safety and reliability goals is essential to adoption.
The Future of Vehicle Control Systems

Expectations for Drive-by-Wire Adoption
Industry projections anticipate continued rapid displacement of mechanical control systems by drive-by-wire across major automakers and vehicle classes. What began with electronic throttle actuation has given way to brake-by-wire and steer-by-wire rolling out on near-term vehicle generations.
As capabilities are proven and costs drop, adoption beyond premium models is forecasted. Several decades from now, mechanical linkages may vanish from mainstream vehicles entirely. The technology promises to transform expectations around vehicle performance and functionality.
Reasons like this are why the demand for automotive technicians will be greater than mechanics going forward as technicians are generally better equipped to deal with electronic troubleshooting and advanced diagnostics.
Role of Self-Driving Car Technologies
The natural extension of progressive autonomy and intelligent capabilities leads toward fully self-driving vehicles. This shift promises a revolution in safety, traffic congestion and quality of life from mobility on demand.
SAE Level 5 autonomy demands pure drive-by-wire configuration, without human controls or manual operation.
As autonomous technologies mature, they could ultimately drive scaled infrastructure changes from supporting connectivity, mapping, positioning and computation. And the vehicles themselves may transform in form and function without traditional operator requirements in mind.

He’s known for his attention to detail and problem-solving skills and enjoys coming up with out-of-the box solutions when the situation requires it.
When he's not troubleshooting customers' cars, you'll most likely find him working on his current project ('96 Bronco) or cooking Italian food for his family.
- Replace the Engine or Replace the Car? (11 Factors to Consider) - Apr 11, 2024
- Plastic Piece Dragging Under Your Car? (What It Is and What To Do) - Mar 21, 2024
- Timing Belt vs Timing Chain (What’s the Difference?) - Feb 27, 2024